
811 字
4 分钟
【ROS2】03 - 基本概念
ROS2上手体验
ros2环境的配置
source /opt/ros/humble/setup.bash #添加环境变量,需要每次启动终端使用此命令,比较繁琐echo " source /opt/ros/humble/setup.bash" >> ~/.bashrc #将添加环境变量的命令添加到脚本,开启终端自启动,无需反复source发布者节点
ros2 run demo_nodes_cpp talker订阅者节点
ros2 run demo_nodes_py listenernode
ros2 run turtlesim turtlesim_nodeLinux/Ros2命令行操作
Linux的命令庞大,但基本掌握常用的一些基础命令即可
获取当前终端操作的目录位置
pwd列举当前目录显示的文件
ls列举当前目录(包括被隐藏的)文件
ls -A新建文件夹
mkdir test修改当前终端路径
cd test/效果:

在当前路径新建文件
touch read.txt在当前路径删除文件
rm read.txt删除文件夹
rm -R test/ #-R表示递归删除安装软件包
sudo apt install libopencv(自动补全)# sudo表示提升当前使用者权限为管理员,apt表示应用,install表示安装,安装opencvros2相关
将正在运行的节点进行打印
ros2 node list查看节点正在运行的信息
ros2 node info /节点名查看节点的基本数据/参数
以查看话题为例,查看哪些话题正在发布和订阅
ros2 topic list对话题进行订阅并打印
ros2 topic echo /turtlel/pose使用topic 进行pub,发布一个消息,和run一样可以控制“海龟”进行运动
ros2 topic pub --rate 1 /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 1.8}}"# --rate 1:频率1HZ# /turtle1/cmd_vel geometry_msgs/msg/Twist# linear:线速度# angular:角速度使用“服务”,产生新的机器人
$ ros2 service call /spawn turtlesim/srv/Spawn "{x: 2, y: 2, theta: 0.2, name: 'abb'}"
#使用ros2 topic list查看是否产生新的接口:turin@turin-virtual-machine:~/Desktop$ ros2 topic list/abb/cmd_vel/abb/color_sensor/abb/pose/parameter_events/rosout/turtle1/cmd_vel/turtle1/color_sensor/turtle1/pose总结:话题是机器人控制的接口,接口的名称不同,控制的对象不同
录制机器人的运动过程(录制)
ros2 bag record /turtle/cmd_vel节点
配置ros2程序执行的入口
from setuptools import setup
package_name = 'learning_node'
setup( name=package_name, version='0.0.0', packages=[package_name], data_files=[ ('share/ament_index/resource_index/packages', ['resource/' + package_name]), ('share/' + package_name, ['package.xml']), ], install_requires=['setuptools'], zip_safe=True, maintainer='Hu Chunxu', maintainer_email='huchunxu@guyuehome.com', description='TODO: Package description', license='TODO: License declaration', tests_require=['pytest'], entry_points={ 'console_scripts': [ 'node_helloworld = learning_node.node_helloworld:main', #节点的配置信息,配置完成后就可以用ros2 run运行 'node_helloworld_class = learning_node.node_helloworld_class:main', 'node_object = learning_node.node_object:main', 'node_object_webcam = learning_node.node_object_webcam:main', ], },)面向过程编程
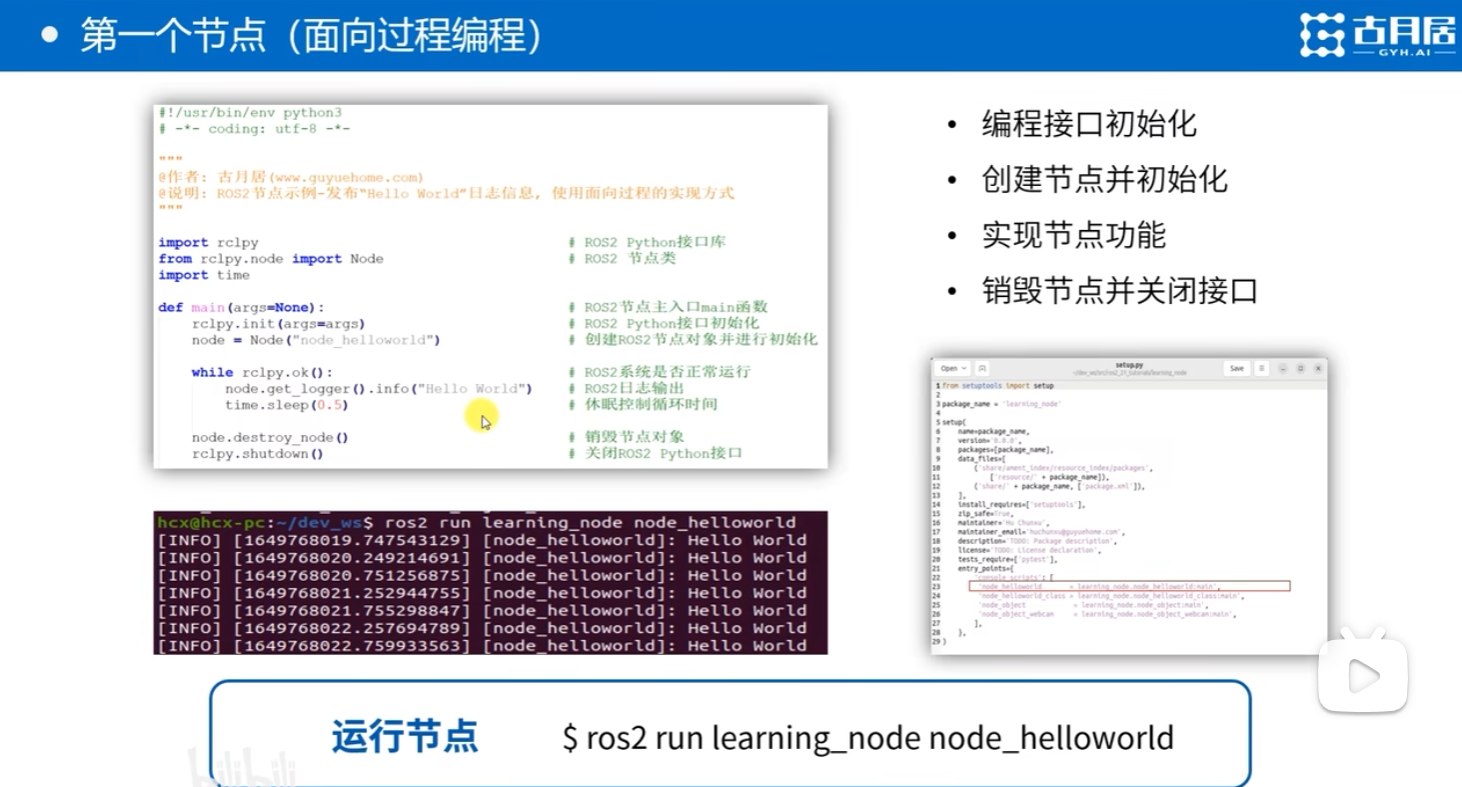
#!/usr/bin/env python3# -*- coding: utf-8 -*-
"""@作者: 古月居(www.guyuehome.com)@说明: ROS2节点示例-发布“Hello World”日志信息, 使用面向对象的实现方式"""
import rclpy # ROS2 Python接口库from rclpy.node import Node # ROS2 节点类import time
"""创建一个HelloWorld节点, 初始化时输出“hello world”日志"""class HelloWorldNode(Node): def __init__(self, name): super().__init__(name) # ROS2节点父类初始化 while rclpy.ok(): # ROS2系统是否正常运行 self.get_logger().info("Hello World") # ROS2日志输出 time.sleep(0.5) # 休眠控制循环时间
def main(args=None): # ROS2节点主入口main函数 rclpy.init(args=args) # ROS2 Python接口初始化 node = HelloWorldNode("node_helloworld_class") # 创建ROS2节点对象并进行初始化 node.destroy_node() # 销毁节点对象 rclpy.shutdown() # 关闭ROS2 Python接口注意:编写完成程序后,需要重新编译,纯py文件无法用ros2命令直接运行, ros2 run 运行的是install
【ROS2】03 - 基本概念
http://www.turinblog.cn/posts/ros203---基本概念/