
IIC通信协议
基本功能
-
同步时序的稳定性比异步时序更高
-
半双工
-
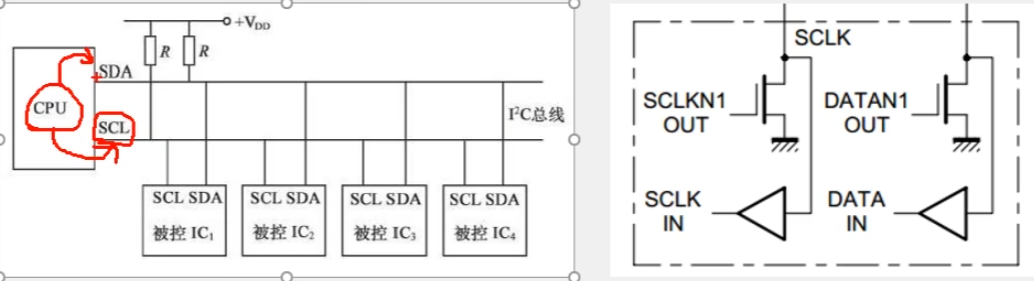
SCL、SDA两根通信线
-
支持总线挂载(一主多从,多主多从)
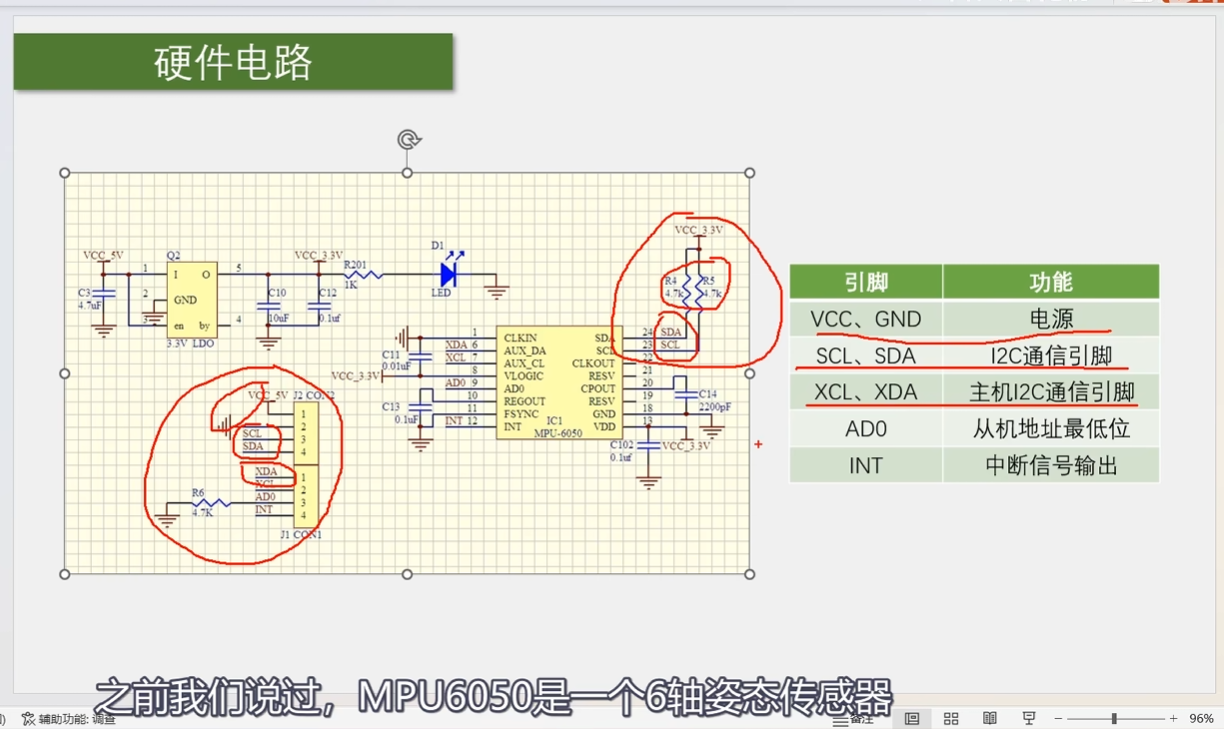
硬件电路
- 所有I2C设备的SCL连接在一起,SDA连接在一起
- 设备的SCL和SDA均要配置成开漏输出模式(防止形成短路电流,SDA要么被上拉,要么输出低电平),会有“线与”的现象。在多主机的模式下,可以利用线与的特性,实现总线仲裁和时钟同步。
- SCL和SDA各添加一个上拉电阻,阻值一般为4.7KΩ左右
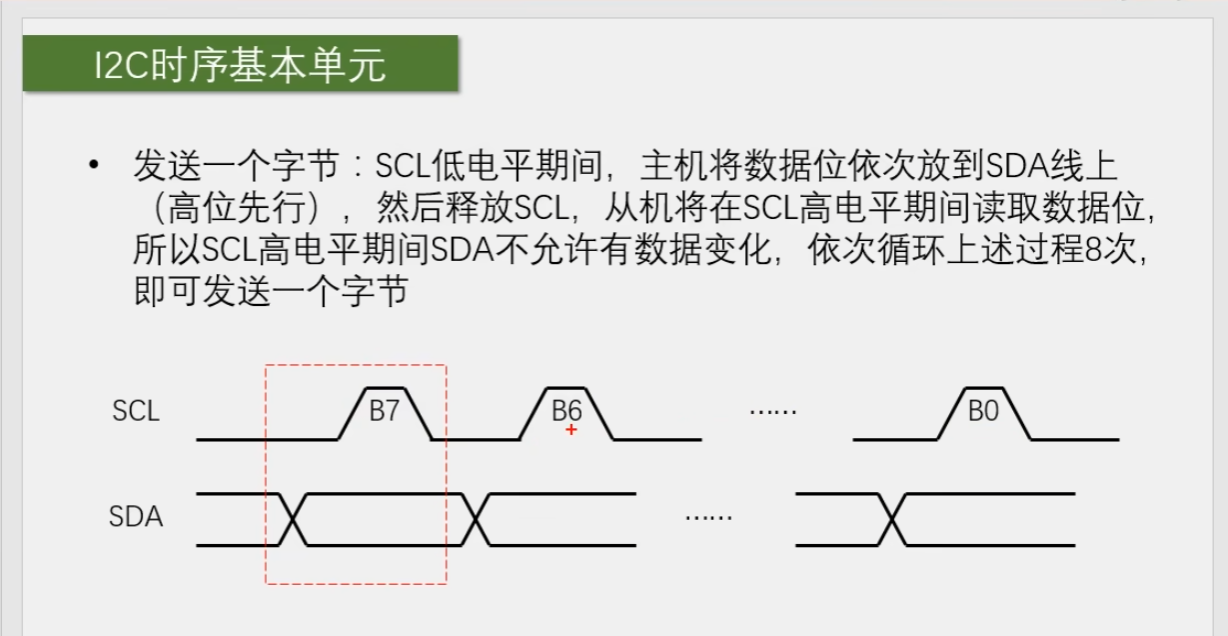
PS:IIC时序是高位先行,串口是低位先行
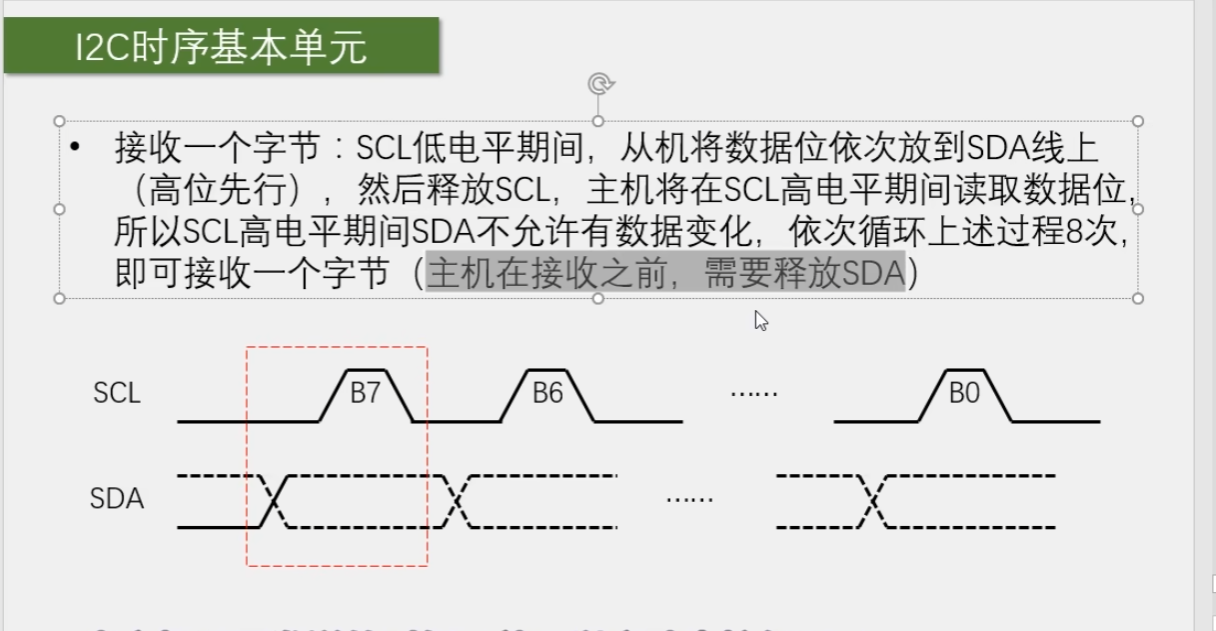
PS:主机接收时,需要释放SDA,即输入模式

PS:从机的地址可以通过电路改变
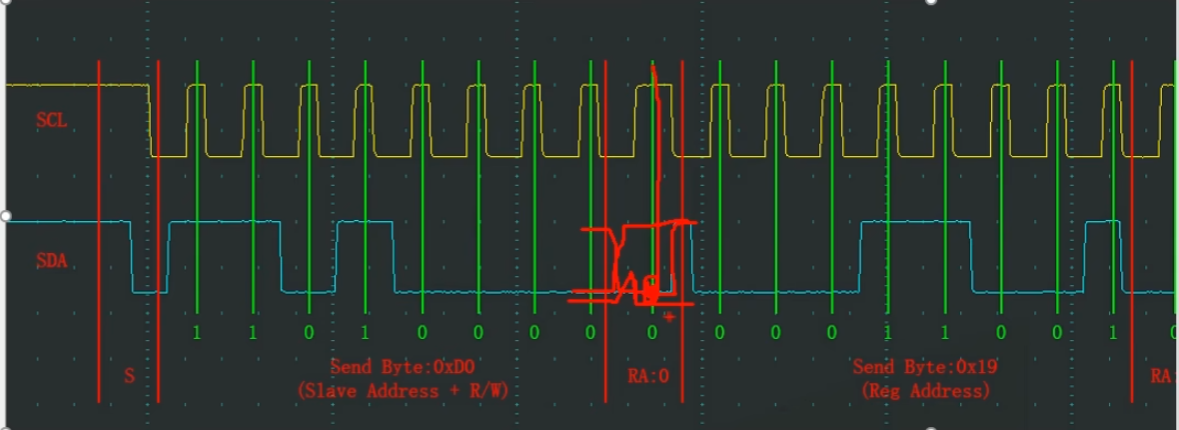
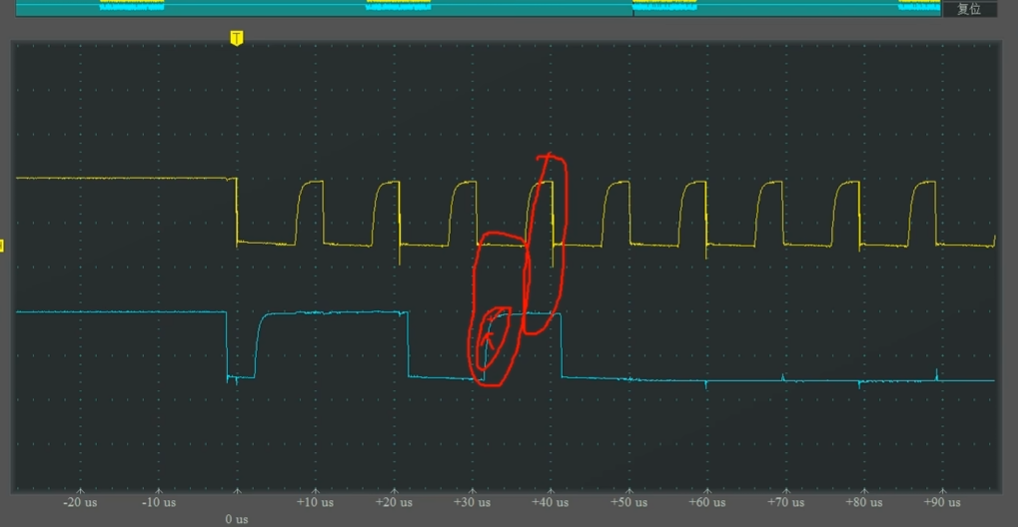
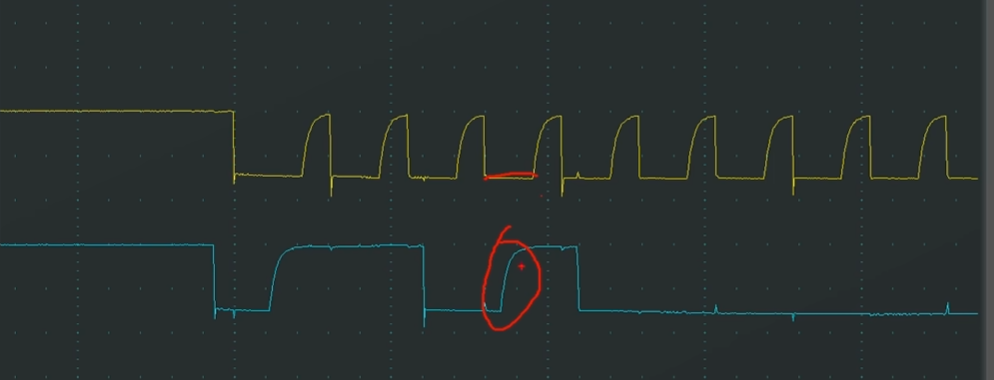
红线处,此时需要从机应答,这里如果但看主机的SDA,应该会释放SDA,即高电平,由于从机要发送应答,根据线与的特性,这里拉低了SDA,所以最后SDA呈现图中所示。
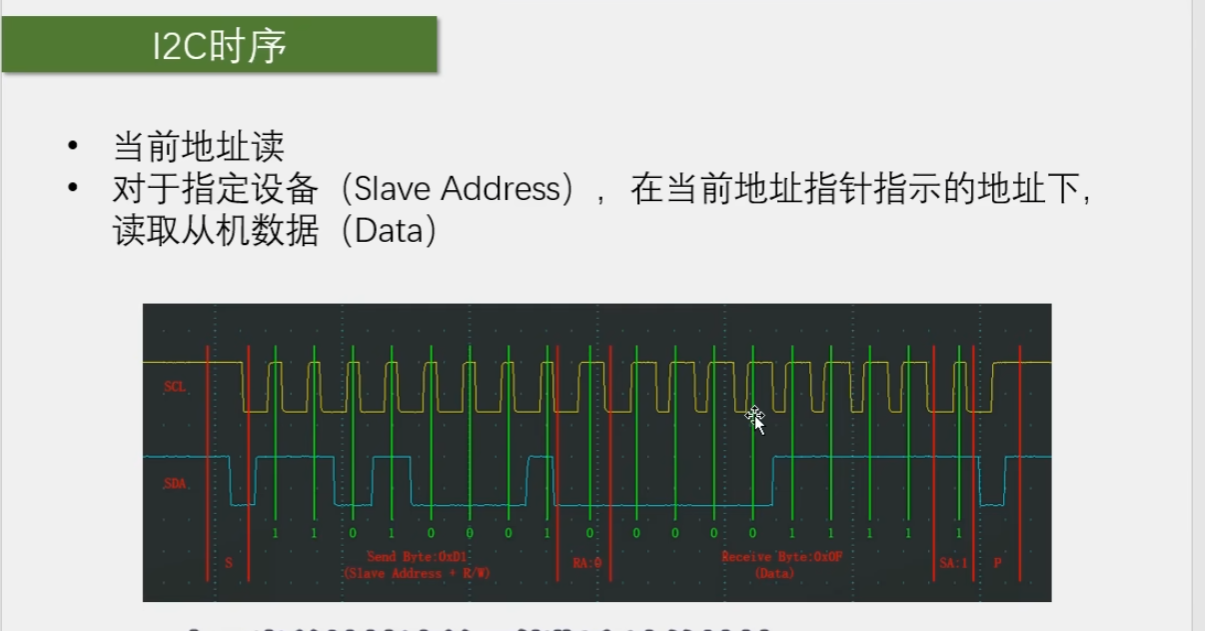
IIC通信的设备中会有单独一个字节空间存储地址指针,当给IIC设备指定地址写时,地址指针会加一,这时如果使用当前地址读,就是读取指针地址指向的内存。此时序较为少用、
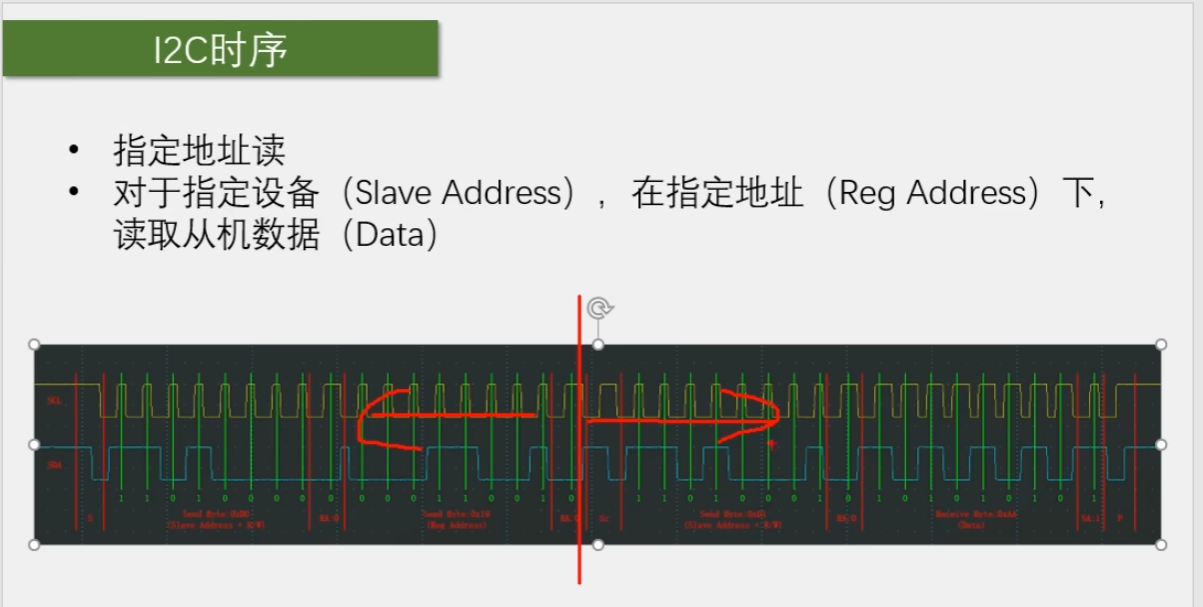
指定地址读的实现原理:先调用指定地址写,但是不写数据。再次调用当前地址读,这样复合的时序就能完成指定地址读的功能了
MPU6050
姿态角(欧拉角)
飞机相对于初始三个轴的夹角:
- 俯仰角:Pitch
- 滚转:Roll
- 偏航:Yaw
要想获得稳定的欧拉角,就需要进行数据融合,进一步得到姿态角。
常见的数据融合算法:
- 互补滤波
- 卡尔曼滤波
ps:惯性导航领域里,姿态解算
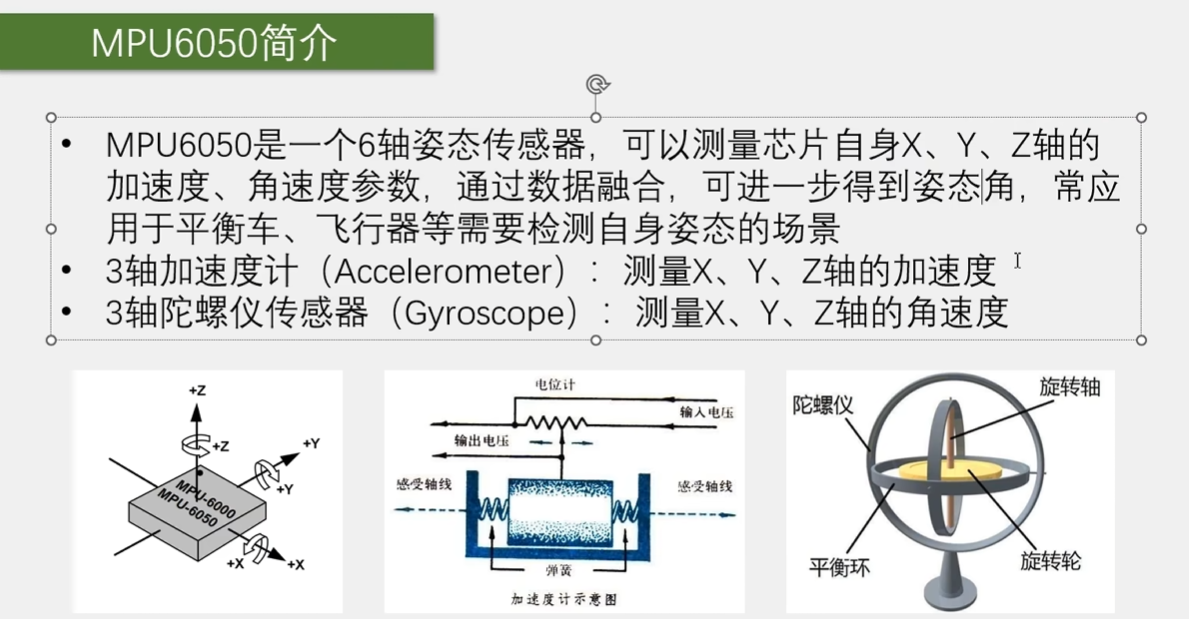
加速度计结构
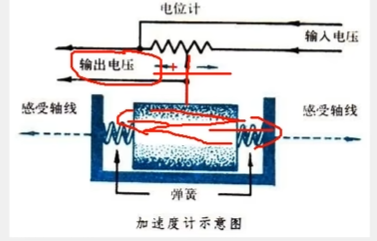
F=ma(测力计)
加速度计测得的是静态加速度,只能在物体静止的时候使用
陀螺仪传感器
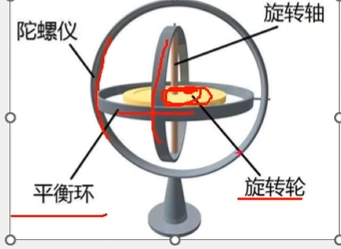
测得的是角速度,要想得到角度,可以进行求积分
陀螺仪具有动态稳定性,不具有静态稳定性
对两种传感器进行互补滤波,就可以得到稳定的姿态角了
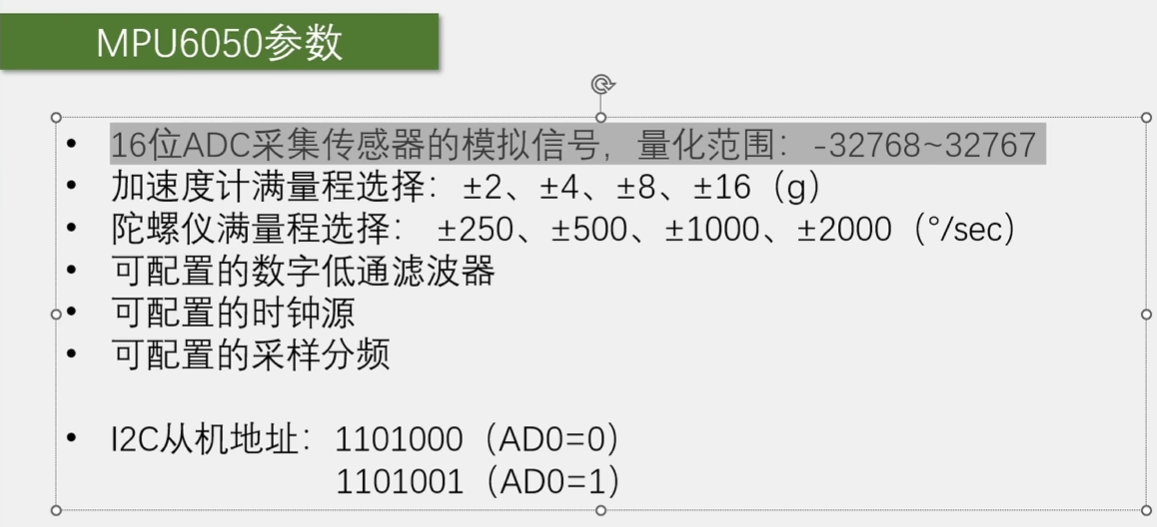
MPU6050的参数
eg: mpu6050的从机地址:0x68 ,IIC时序中发送的第一个字节,高七位为从机地址,第八位为读写位。有时候把0XD0当作MPU6050的地址
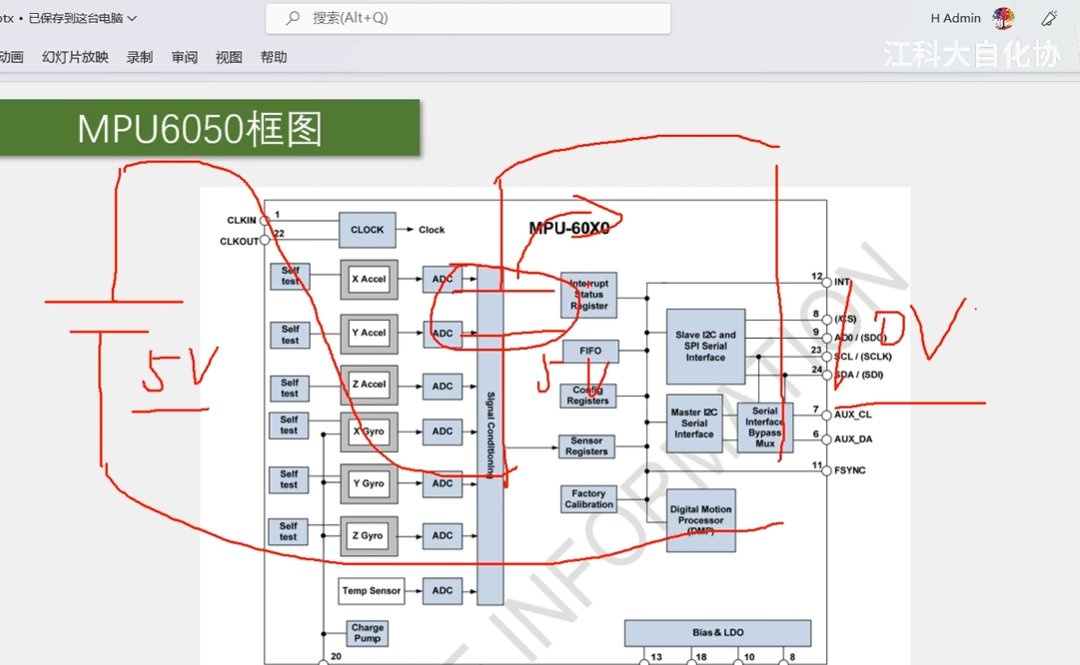
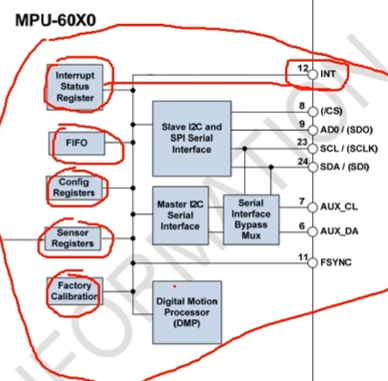
硬件结构
六轴传感器的缺点:没有稳定的参考方向
XCL,XDA:挂载磁力计,气压计
INT引脚:可以配置MPU6050内部一些事件,产生电平跳变
PS:MPU6050内部包含DMP单元:进行姿态融合和数据结算
包含稳压电路
传感器内部含有自测单元
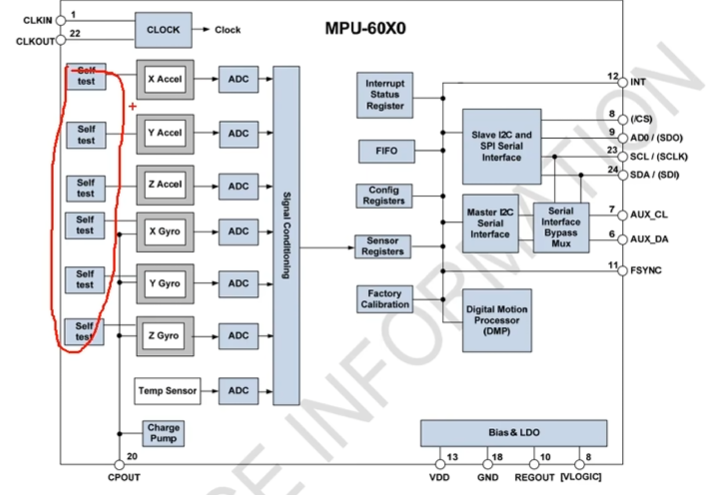
使能自测->读取数据1->失能自测->读取数据2,两个数据相减,得到的数据称作自测响应,自测响应如果在规定的范围内,说明芯片性能没问题。
电荷泵

是一种升压电路
原理:电源和电容串并联的切换(充电->串联->相当于电压升高(放电)->快速切换到并联->充电->循环)+ 电容滤波 = 平稳升压
DMP(数字运动处理器)
配合MPU6050官方的DMP库,进行姿态解算。
引脚说明
FSYNC:帧同步
通信接口:用于和STM32通信
xxxxxxxxxx python script_name.py —train_data_dir “path/to/train_data” —test_data_dir “path/to/test_data” —img_height 128 —img_width 128 —batch_size 64 —epochs 15python
可以拓展连接磁力计

软件IIC读写MPU6050
#include <stm32f10x.h> //Device header#include <Delay.h>#include <OLED.h>#include <MyIIC.h>
int main(void){ OLED_Init();
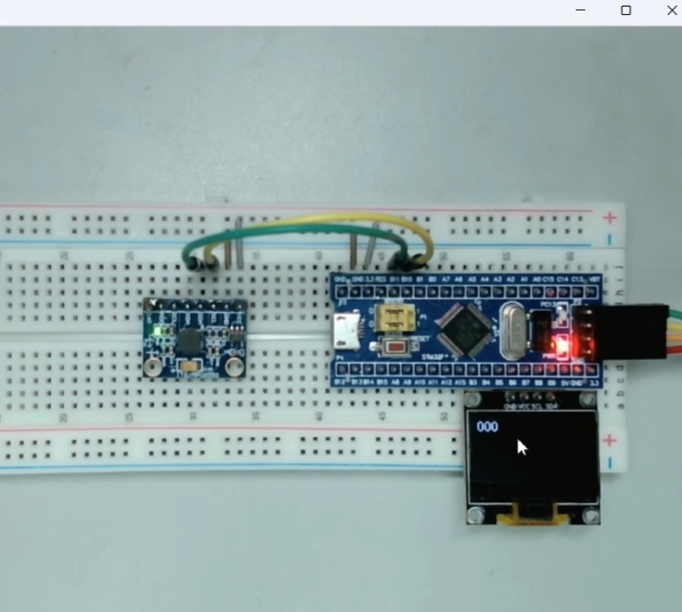
/*主机寻址MPU6050*/ MyIIC_Init(); MyIIC_Start(); MyIIC_SendByte(0xD0);//1101 000 0 前七位为MPU6050的从机地址 uint8_t Ack = MyIIC_ReceiveAck(); MyIIC_Stop();
OLED_ShowNum(1,1,Ack,3); while(1) {
}}
修改MPU6050地址
可见,寻址无应答
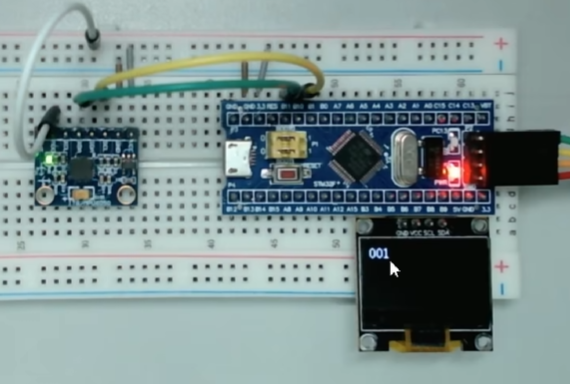
读取MPU6050 ID号
int main(void){ OLED_Init(); MPU6050_Init(); /*//主机寻址MPU6050 MyIIC_Init(); MyIIC_Start(); MyIIC_SendByte(0xD2);//1101 000 0 前七位为MPU6050的从机地址 uint8_t Ack = MyIIC_ReceiveAck(); MyIIC_Stop(); OLED_ShowNum(1,1,Ack,3); */ uint8_t ID = MPU6050_ReadReg(0x75);//读取MPU6050ID号 OLED_ShowHexNum(1,1,ID,2); while(1) {
}}
写MPU6050,需要关闭MPU6050的睡眠模式
int main(void){ OLED_Init(); MPU6050_Init();
MPU6050_WriteReg(0x6B,0x00);//在电源管理器1,写入0x00,接触睡眠模式
MPU6050_WriteReg(0x19,0xAA);//更改采样频率
uint8_t ID = MPU6050_ReadReg(0x19);//读取MPU6050采样频率 OLED_ShowHexNum(1,1,ID,2); while(1) {
}}
PS:某种程度上来说,对寄存器的读写操作可以看作读写一个存储器,但是寄存器能反应硬件电路的状态,对硬件电路进行操作
MPU6050读取六轴姿态值
函数定义
//使用指针,实现函数多返回值的操作void MPU6050_GetData(int16_t *AccX,int16_t *AccY,int16_t *AccZ, int16_t *GyroX,int16_t *GyroY,int16_t *GyroZ){ uint8_t DataH ,DataL;
DataH=MPU6050_ReadReg(MPU6050_ACCEL_XOUT_H); DataL=MPU6050_ReadReg(MPU6050_ACCEL_XOUT_L); *AccX = (DataH<<8) | DataL;
DataH=MPU6050_ReadReg(MPU6050_ACCEL_YOUT_H); DataL=MPU6050_ReadReg(MPU6050_ACCEL_YOUT_L); *AccY = (DataH<<8) | DataL;
DataH=MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_H); DataL=MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_L); *AccZ = (DataH<<8) | DataL;
DataH=MPU6050_ReadReg(MPU6050_GYRO_XOUT_H); DataL=MPU6050_ReadReg(MPU6050_GYRO_XOUT_L); *GyroX = (DataH<<8) | DataL;
DataH=MPU6050_ReadReg(MPU6050_GYRO_YOUT_H); DataL=MPU6050_ReadReg(MPU6050_GYRO_YOUT_L); *GyroY = (DataH<<8) | DataL;
DataH=MPU6050_ReadReg(MPU6050_GYRO_ZOUT_H); DataL=MPU6050_ReadReg(MPU6050_GYRO_ZOUT_L); *GyroZ = (DataH<<8) | DataL;}主程序
int16_t Ax,Ay,Az,Gx,Gy,Gz;
int main(void){ OLED_Init(); MPU6050_Init(); while(1) { MPU6050_GetData(&Ax,&Ay,&Az,&Gx,&Gy,&Gz); OLED_ShowSignedNum(2,1,Ax,5); OLED_ShowSignedNum(3,1,Ay,5); OLED_ShowSignedNum(4,1,Az,5); OLED_ShowSignedNum(2,8,Gx,5); OLED_ShowSignedNum(3,8,Gy,5); OLED_ShowSignedNum(4,8,Gz,5); }}加速度计最大量程为16g
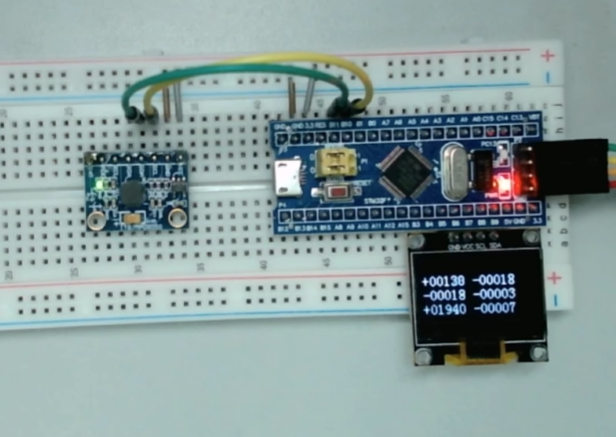
左侧为加速度计,右侧为角速度测量值
硬件IIC读写MPU6050
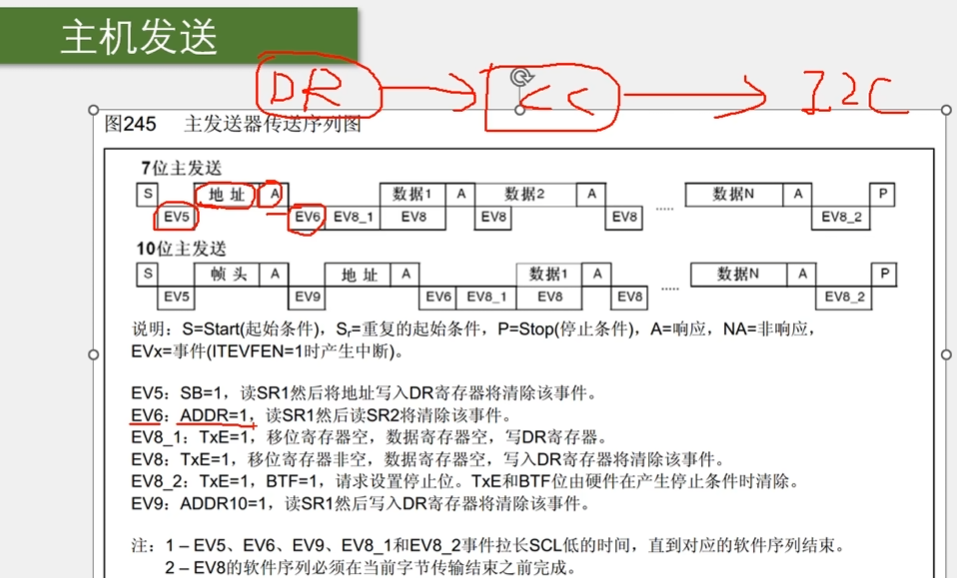
CR:控制寄存器
DR:数据寄存器
SR:状态寄存器
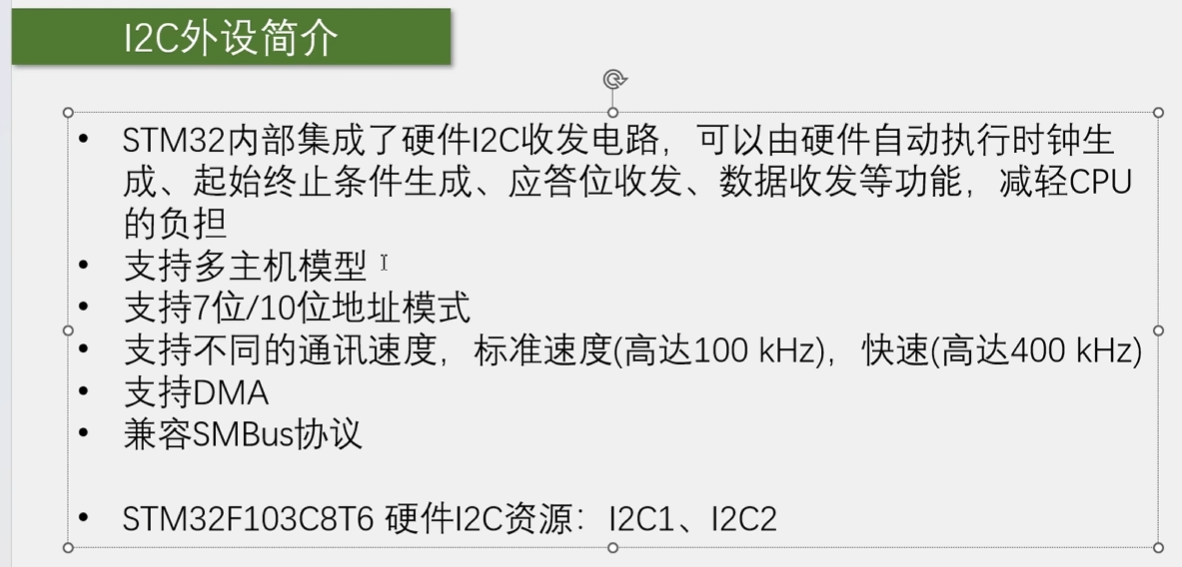
STM32IIC外设
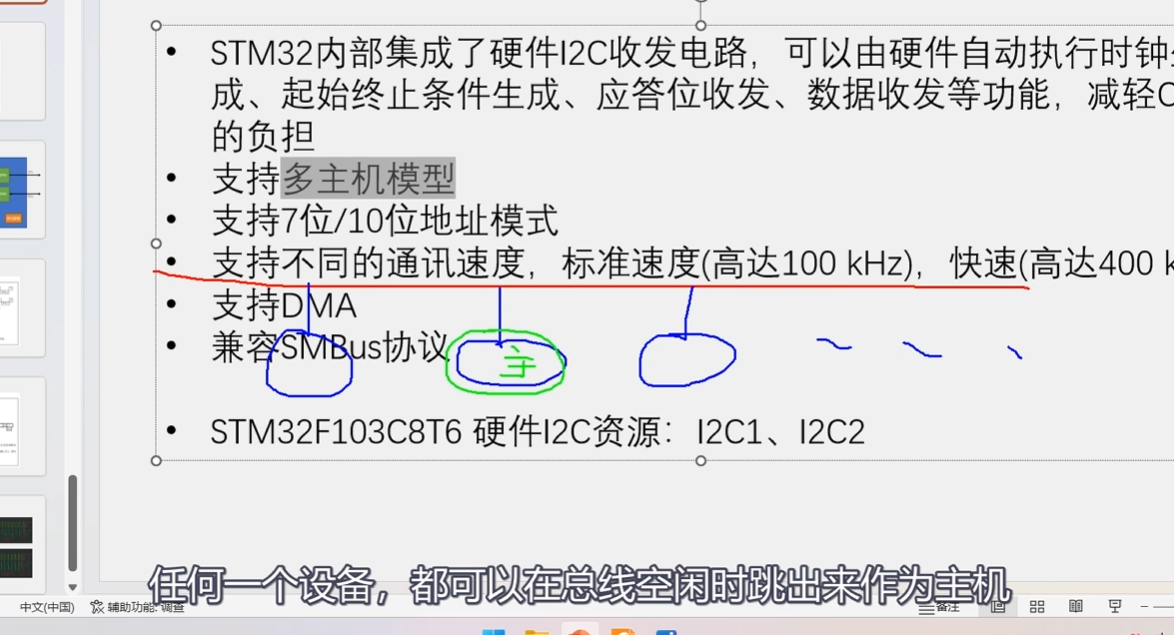
多主机模型
一主多从
多主多从
固定多主机:
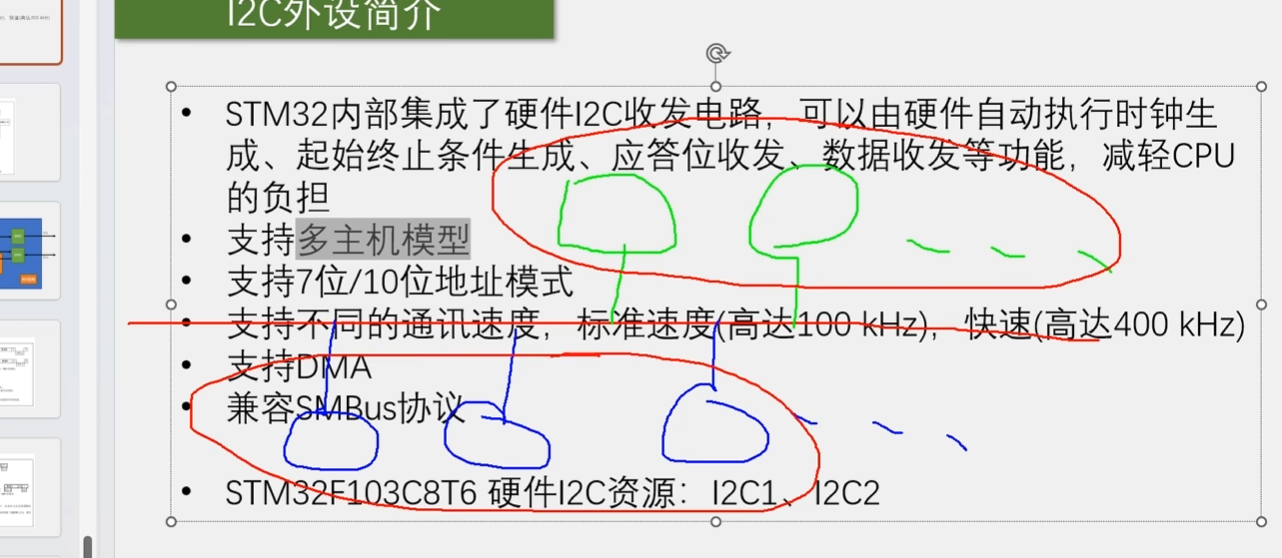
可变多主机:
GPIO复用输入和复用输出

IIC主机发送流程图
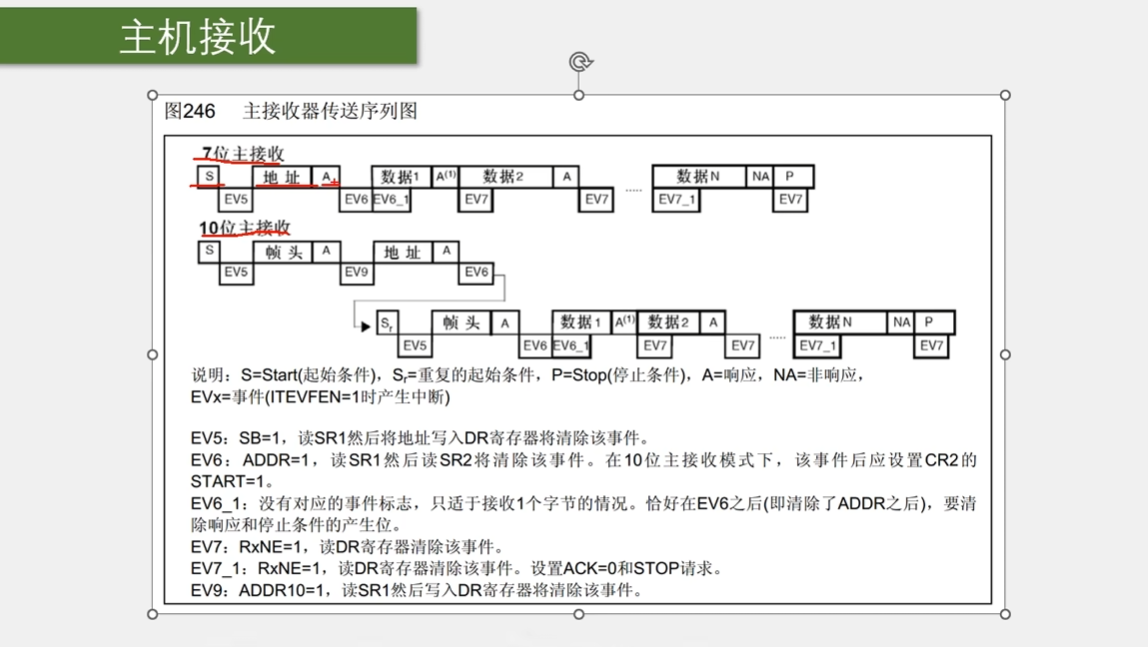
IIC主机接收流程图
库函数解释
产生起始条件
void I2C_GenerateSTART(I2C_TypeDef* I2Cx, FunctionalState NewState);
生成终止条件
void I2C_GenerateSTOP(I2C_TypeDef* I2Cx, FunctionalState NewState);
配置在收到一个字节后,是否给从机应答
void I2C_AcknowledgeConfig(I2C_TypeDef* I2Cx, FunctionalState NewState);
写数据到数据寄存器DR
void I2C_SendData(I2C_TypeDef* I2Cx, uint8_t Data);
读取DR的数据,作为返回值
uint8_t I2C_ReceiveData(I2C_TypeDef* I2Cx);
发送7位地址
void I2C_Send7bitAddress(I2C_TypeDef* I2Cx, uint8_t Address, uint8_t I2C_Direction);
状态监控函数的官方说明
/** * @brief **************************************************************************************** * * I2C State Monitoring Functions * **************************************************************************************** * This I2C driver provides three different ways for I2C state monitoring * depending on the application requirements and constraints: * * * 1) Basic state monitoring: * Using I2C_CheckEvent() function: * It compares the status registers (SR1 and SR2) content to a given event * (can be the combination of one or more flags). * It returns SUCCESS if the current status includes the given flags * and returns ERROR if one or more flags are missing in the current status. * - When to use: * - This function is suitable for most applications as well as for startup * activity since the events are fully described in the product reference manual * (RM0008). * - It is also suitable for users who need to define their own events. * - Limitations: * - If an error occurs (ie. error flags are set besides to the monitored flags), * the I2C_CheckEvent() function may return SUCCESS despite the communication * hold or corrupted real state. * In this case, it is advised to use error interrupts to monitor the error * events and handle them in the interrupt IRQ handler. * * @note * For error management, it is advised to use the following functions: * - I2C_ITConfig() to configure and enable the error interrupts (I2C_IT_ERR). * - I2Cx_ER_IRQHandler() which is called when the error interrupt occurs. * Where x is the peripheral instance (I2C1, I2C2 ...) * - I2C_GetFlagStatus() or I2C_GetITStatus() to be called into I2Cx_ER_IRQHandler() * in order to determine which error occurred. * - I2C_ClearFlag() or I2C_ClearITPendingBit() and/or I2C_SoftwareResetCmd() * and/or I2C_GenerateStop() in order to clear the error flag and source, * and return to correct communication status. * * * 2) Advanced state monitoring: * Using the function I2C_GetLastEvent() which returns the image of both status * registers in a single word (uint32_t) (Status Register 2 value is shifted left * by 16 bits and concatenated to Status Register 1). * - When to use: * - This function is suitable for the same applications above but it allows to * overcome the limitations of I2C_GetFlagStatus() function (see below). * The returned value could be compared to events already defined in the * library (stm32f10x_i2c.h) or to custom values defined by user. * - This function is suitable when multiple flags are monitored at the same time. * - At the opposite of I2C_CheckEvent() function, this function allows user to * choose when an event is accepted (when all events flags are set and no * other flags are set or just when the needed flags are set like * I2C_CheckEvent() function). * - Limitations: * - User may need to define his own events. * - Same remark concerning the error management is applicable for this * function if user decides to check only regular communication flags (and * ignores error flags). * * * 3) Flag-based state monitoring: * Using the function I2C_GetFlagStatus() which simply returns the status of * one single flag (ie. I2C_FLAG_RXNE ...). * - When to use: * - This function could be used for specific applications or in debug phase. * - It is suitable when only one flag checking is needed (most I2C events * are monitored through multiple flags). * - Limitations: * - When calling this function, the Status register is accessed. Some flags are * cleared when the status register is accessed. So checking the status * of one Flag, may clear other ones. * - Function may need to be called twice or more in order to monitor one * single event. * */IIC配置占空比的缘由
上升沿变化较慢,下降沿比较迅速,标准速度下,时钟占空比接近1:1,快速状态,占空比接近2:1
100KHZ
400KHZ
* 1) Basic state monitoring ******************************************************************************* */
/** * @brief Checks whether the last I2Cx Event is equal to the one passed * as parameter. * @param I2Cx: where x can be 1 or 2 to select the I2C peripheral. * @param I2C_EVENT: specifies the event to be checked. * This parameter can be one of the following values: * @arg I2C_EVENT_SLAVE_TRANSMITTER_ADDRESS_MATCHED : EV1 * @arg I2C_EVENT_SLAVE_RECEIVER_ADDRESS_MATCHED : EV1 * @arg I2C_EVENT_SLAVE_TRANSMITTER_SECONDADDRESS_MATCHED : EV1 * @arg I2C_EVENT_SLAVE_RECEIVER_SECONDADDRESS_MATCHED : EV1 * @arg I2C_EVENT_SLAVE_GENERALCALLADDRESS_MATCHED : EV1 * @arg I2C_EVENT_SLAVE_BYTE_RECEIVED : EV2 * @arg (I2C_EVENT_SLAVE_BYTE_RECEIVED | I2C_FLAG_DUALF) : EV2 * @arg (I2C_EVENT_SLAVE_BYTE_RECEIVED | I2C_FLAG_GENCALL) : EV2 * @arg I2C_EVENT_SLAVE_BYTE_TRANSMITTED : EV3 * @arg (I2C_EVENT_SLAVE_BYTE_TRANSMITTED | I2C_FLAG_DUALF) : EV3 * @arg (I2C_EVENT_SLAVE_BYTE_TRANSMITTED | I2C_FLAG_GENCALL) : EV3 * @arg I2C_EVENT_SLAVE_ACK_FAILURE : EV3_2 * @arg I2C_EVENT_SLAVE_STOP_DETECTED : EV4 * @arg I2C_EVENT_MASTER_MODE_SELECT : EV5 * @arg I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED : EV6 * @arg I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED : EV6 * @arg I2C_EVENT_MASTER_BYTE_RECEIVED : EV7 * @arg I2C_EVENT_MASTER_BYTE_TRANSMITTING : EV8 * @arg I2C_EVENT_MASTER_BYTE_TRANSMITTED : EV8_2 * @arg I2C_EVENT_MASTER_MODE_ADDRESS10 : EV9 * * @note: For detailed description of Events, please refer to section * I2C_Events in stm32f10x_i2c.h file. * * @retval An ErrorStatus enumeration value: * - SUCCESS: Last event is equal to the I2C_EVENT * - ERROR: Last event is different from the I2C_EVENT */解决WHILE死循环等待的问题
多个while,比较危险,一旦通信出现问题,程序直接卡死
void MPU6050_WriteReg(uint8_t RegAddress,uint8_t Data){ /*软件I2C,阻塞式程序 MyIIC_Start(); MyIIC_SendByte(MPU6050_ADDRESS); MyIIC_ReceiveAck();//可以加判断,确保时序的正确 MyIIC_SendByte(RegAddress);//指定要写入的寄存器 MyIIC_ReceiveAck(); MyIIC_SendByte(Data); MyIIC_ReceiveAck(); MyIIC_Stop(); */ //硬件IIC,非阻塞式程序
I2C_GenerateSTART(I2C2,ENABLE);
while(I2C_CheckEvent(I2C2,I2C_EVENT_MASTER_MODE_SELECT ) !=SUCCESS);//事件监测
I2C_Send7bitAddress(I2C2,MPU6050_ADDRESS,I2C_Direction_Transmitter);//选择I2C外设,从机地址,从机地址最低位。此函数自带接收应答的功能 while(I2C_CheckEvent(I2C2,I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED) !=SUCCESS);
I2C_SendData(I2C2,RegAddress);//写入DR,需要等待EV8事件 while(I2C_CheckEvent(I2C2,I2C_EVENT_MASTER_BYTE_TRANSMITTING) !=SUCCESS);
I2C_SendData(I2C2,Data); while(I2C_CheckEvent(I2C2,I2C_EVENT_MASTER_BYTE_TRANSMITTED) !=SUCCESS);//发送完最后一个字节,需要监测EB8_1事件
I2C_GenerateSTOP(I2C2,ENABLE);}保护程序
void MPU6050_WaitEvent(I2C_TypeDef* I2Cx, uint32_t I2C_EVENT){ uint32_t Timeout; Timeout= 10000; while(I2C_CheckEvent(I2Cx,I2C_EVENT) != SUCCESS) { Timeout--; if(Timeout==0) { break; } }}DMP库
digital motion processor数字运动处理器,mpu6050自带的一个硬件,可以直接输出用于姿态结算的四元数