
-
打开RCC内部时钟
-
选择时基单元时钟源
-
配置时基单元
-
配置输出中断控制,允许更新中断输出到NVIC
-
配置NVIC,打开定时器通道,并分配一个优先级
-
运行控制
相关函数
- 恢复缺省配置
TIM_DeInit(TIM_TypeDef* TIMx);
- 时基单元初始化
TIM_TimeBaseInit(TIM_TypeDef* TIMx, TIM_TimeBaseInitTypeDef* TIM_TimeBaseInitStruct);
TIMx:选择定时器
TIM_TimeBaseInitStruct:结构体,定时器有关的配置
- 结构体初始化
TIM_TimeBaseStructInit(TIM_TimeBaseInitTypeDef* TIM_TimeBaseInitStruct);
- 使能计数器,对应运行控制
TIM_Cmd(TIM_TypeDef* TIMx, FunctionalState NewState);
- 中断输出使能控制
TIM_ITConfig(TIM_TypeDef* TIMx, uint16_t TIM_IT, FunctionalState NewState); 使能中断输出
uint16_t TIM 选择中断输出
NewState:使能状态
时基单元的时钟选择部分函数:
- 选择内部时钟
void TIM_InternalClockConfig(TIM_TypeDef* TIMx);
- 选择ITRX其他定时器的时钟
void TIM_ITRxExternalClockConfig(TIM_TypeDef* TIMx, uint16_t TIM_InputTriggerSource);
TIMx 选择要配置的寄存器
TIM_InputTriggerSource 选择接入的寄存器
- 选择TIX捕获通道的时钟
void TIM_TIxExternalClockConfig(TIM_TypeDef* TIMx, uint16_t TIM_TIxExternalCLKSource,uint16_t TIM_ICPolarity, uint16_t ICFilter);
TIM_TIxExternalCLKSource,uint16_t 选择TIX具体的引脚
TIM_ICPolarity 输入的极性
ICFilter 滤波器
- 选择ETR通过外部时钟模式1输入的时钟
void TIM_ETRClockMode1Config(TIM_TypeDef* TIMx, uint16_t TIM_ExtTRGPrescaler, uint16_t TIM_ExtTRGPolarity, uint16_t ExtTRGFilter);
TIM_ExtTRGPrescaler 可以对ETR外部时钟再次分频
ExtTRGPolarity/ExtTRGFilter 极性/滤波器
- 选择ETR通过外部时钟模式1输入的时钟
void TIM_ETRClockMode2Config(TIM_TypeDef* TIMx, uint16_t TIM_ExtTRGPrescaler, uint16_t TIM_ExtTRGPolarity, uint16_t ExtTRGFilter);
同TIM_ETRClockMode1Config(
- 单独配置ETR引脚的预分频器、极性、滤波器这些参数
void TIM_ETRConfig(TIM_TypeDef* TIMx, uint16_t TIM_ExtTRGPrescaler, uint16_t TIM_ExtTRGPolarity,
uint16_t ExtTRGFilter);
初始化后,像自动重装值和预分频值等等,可能需要修改,有一些函数可以单独修改这些参数
- 单独修改预分频值
void TIM_PrescalerConfig(TIM_TypeDef* TIMx, uint16_t Prescaler, uint16_t TIM_PSCReloadMode);
uint16_t Prescaler 要写入的预分频值
PSCReloadMode 写入的模式
- 改变计数器的计数模式
void TIM_CounterModeConfig(TIM_TypeDef* TIMx, uint16_t TIM_CounterMode);
TIM_CounterMode 计数器的计数模式
- 自动重装器预装功能配置
void TIM_ARRPreloadConfig(TIM_TypeDef* TIMx, FunctionalState NewState);
NewState 使能状态
- 给计数器写入一个值
xxxxxxxxxx python script_name.py —train_data_dir “path/to/train_data” —test_data_dir “path/to/test_data” —img_height 128 —img_width 128 —batch_size 64 —epochs 15python
- 给自动重装器写入一个值
void TIM_SetAutoreload(TIM_TypeDef* TIMx, uint16_t Autoreload);
- 获取当前计数器的值
uint16_t TIM_GetCounter(TIM_TypeDef* TIMx);
- 获取当前预分频器的值
uint16_t TIM_GetPrescaler(TIM_TypeDef* TIMx);
- 获取/清除标志位相关函数
FlagStatus TIM_GetFlagStatus(TIM_TypeDef* TIMx, uint16_t TIM_FLAG);
void TIM_ClearFlag(TIM_TypeDef* TIMx, uint16_t TIM_FLAG);
ITStatus TIM_GetITStatus(TIM_TypeDef* TIMx, uint16_t TIM_IT);
void TIM_ClearITPendingBit(TIM_TypeDef* TIMx, uint16_t TIM_IT);
编写定时器初始化框架
void Timer_Init(void){ RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);//开启TIM2时钟
TIM_InternalClockConfig(TIM2);//定时器上电后默认使用内部时钟,此语句也可以不写
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; TIM_TimeBaseInitStructure.TIM_ClockDivision; TIM_TimeBaseInitStructure.TIM_CounterMode; TIM_TimeBaseInitStructure.TIM_Prescaler; TIM_TimeBaseInitStructure.TIM_Period; TIM_TimeBaseInitStructure.TIM_RepetitionCounter}滤波原理
-
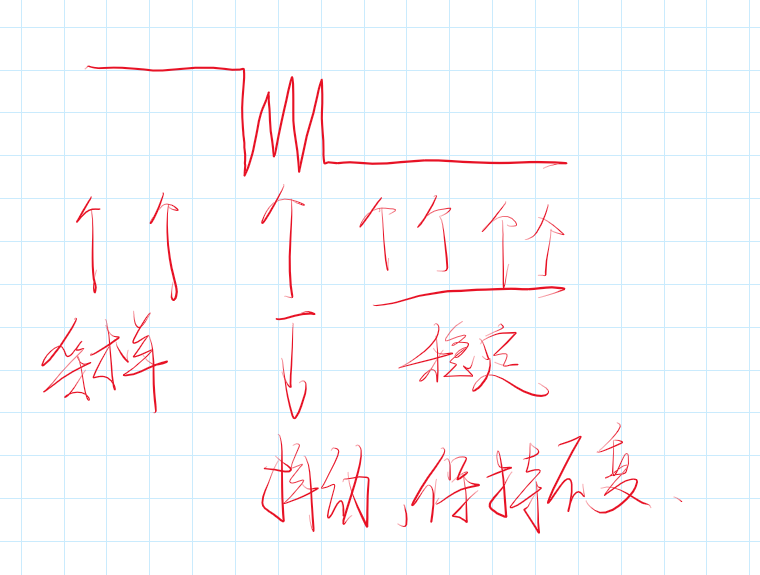
在一个固定的时钟频率f下进行采样,如果连续N个采样点都是相同的电平,说明信号稳定,如果N个采样点抖动,就让输出保持不变,这样就能保证输出信号在一定程度上被滤波保护。
-
采样点数越多,滤波效果越好,但是同时信号延迟越大
-
采样频率的来源?
- 由内部时钟直接而来
- 也可是内部时钟+一个时钟分频而来
TIM_Clock_Division_CKD的取值
#define TIM_CKD_DIV1 ((uint16_t)0x0000)//1分频#define TIM_CKD_DIV2 ((uint16_t)0x0100)#define TIM_CKD_DIV4 ((uint16_t)0x0200)代码部分
一、定时器中断(内部时钟)
定时器底层程序
#include "stm32f10x.h" // Device header
void Timer_Init(void){ RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);//开启TIM2时钟
/*时基单元初始化配置*/ TIM_InternalClockConfig(TIM2);//定时器上电后默认使用内部时钟,此语句也可以不写
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1 ;//1分频 TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//向上计数 /*时基单元关键寄存器*/ TIM_TimeBaseInitStructure.TIM_Prescaler= 7200 - 1;//ARR , 对72MHZ进行7200分频 也就是10MHZ TIM_TimeBaseInitStructure.TIM_Period= 10000 - 1;//PSC,计数器重装载值,10000次清零,控制ARR和PSC可以控制计数频率 TIM_TimeBaseInitStructure.TIM_RepetitionCounter=0;//重复计数器,高级定时器钟存在,这里不需要用
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);//时基单元初始化 //1-->注意:更新中断和更新事件同时发生,初始化会立刻进入中断 TIM_ClearFlag(TIM2,TIM_FLAG_Update);//2-->手动清理中断标志位
TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE);//中断配置,选择更新中断,使能
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure; NVIC_InitStructure.NVIC_IRQChannel= TIM2_IRQn;//定时器通道设置,选择TIM2_IRQn NVIC_InitStructure.NVIC_IRQChannelCmd= ENABLE; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=2; NVIC_InitStructure.NVIC_IRQChannelSubPriority=1;
NVIC_Init(&NVIC_InitStructure);//定时器初始化
TIM_Cmd(TIM2,ENABLE);//启动定时器}
//中断服务程序模板/*void TIM2_IRQHandler(void){ if (TIM_GetITStatus(TIM2,TIM_IT_Update) == SET)//获取中断标志位,参数:定时器2,检测更新标志位 { TIM_ClearITPendingBit(TIM2,TIM_IT_Update);//清除标志位 }}*/主程序
#include <stm32f10x.h> //Device header#include <Delay.h>#include <OLED.h>#include <CountSensor.h>#include <Encoder.h>#include <Timer.h>
uint16_t Num;//定义一个16位的全局变量
int main(void){ OLED_Init(); Timer_Init();
OLED_ShowString(1,1,"Num:"); OLED_ShowString(2,1,"CNT:"); while (1) { OLED_ShowNum(1,5,Num,5);//计时的值 OLED_ShowNum(2,5,TIM_GetCounter(TIM2),5);//CNT计数器的值 }}
void TIM2_IRQHandler(void){ if (TIM_GetITStatus(TIM2,TIM_IT_Update) == SET)//获取中断标志位,参数:定时器2,检测更新标志位 { Num++; TIM_ClearITPendingBit(TIM2,TIM_IT_Update);//清除标志位 }}二、外部时钟
定时器底层程序
#include "stm32f10x.h" // Device header
void Timer_Init(void){ RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);//开启TIM2时钟 RCC_APB1PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//开启GPIOA时钟
GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU;//上拉输入模式 GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0; GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz; GPIO_Init(GPIOA,&GPIO_InitStructure);
//TIM_InternalClockConfig(TIM2);//定时器上电后默认使用内部时钟,此语句也可以不写 TIM_ETRClockMode2Config(TIM2,TIM_ExtTRGPSC_OFF,TIM_ExtTRGPolarity_NonInverted,0x00);//通过ETR引脚的外部时钟模式2配置 //定时器选择 不需要分频 外部触发的极性:不反相 外部触发滤波器,决定F和N,这里不需要滤波器
/*时基单元初始化配置*/ TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1 ;//1分频 TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//向上计数 /**时基单元关键寄存器**/ TIM_TimeBaseInitStructure.TIM_Prescaler= 1 - 1;//ARR , 对72MHZ进行7200分频 也就是10MHZ TIM_TimeBaseInitStructure.TIM_Period= 10 - 1;//PSC,计数器重装载值,10000次清零,控制ARR和PSC可以控制计数频率 TIM_TimeBaseInitStructure.TIM_RepetitionCounter=0;//重复计数器,高级定时器钟存在,这里不需要用
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);//时基单元初始化 //1-->注意:更新中断和更新事件同时发生,初始化会立刻进入中断 TIM_ClearFlag(TIM2,TIM_FLAG_Update);//2-->手动清理中断标志位
/*中断配置*/ TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE);//中断配置,选择更新中断,使能
/*NVIC配置*/ NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); NVIC_InitTypeDef NVIC_InitStructure; NVIC_InitStructure.NVIC_IRQChannel= TIM2_IRQn;//定时器通道设置,选择TIM2_IRQn NVIC_InitStructure.NVIC_IRQChannelCmd= ENABLE; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=2; NVIC_InitStructure.NVIC_IRQChannelSubPriority=1; NVIC_Init(&NVIC_InitStructure);//NVIC初始化
TIM_Cmd(TIM2,ENABLE);//启动定时器}
//CNT值封装函数uint16_t Timer_GetCounter(void){ return TIM_GetCounter(TIM2);}
/*void TIM2_IRQHandler(void){ if (TIM_GetITStatus(TIM2,TIM_IT_Update) == SET)//获取中断标志位,参数:定时器2,检测更新标志位 { TIM_ClearITPendingBit(TIM2,TIM_IT_Update);//清除标志位 }}*/主程序
#include <stm32f10x.h> //Device header#include <Delay.h>#include <OLED.h>#include <CountSensor.h>#include <Encoder.h>#include <Timer.h>
uint16_t Num=0;//定义一个16位的全局变量
int main(void){ OLED_Init(); Timer_Init();
OLED_ShowString(1,1,"Num:"); OLED_ShowString(2,1,"CNT:"); while (1) { OLED_ShowNum(1,5,Num,5);//计时的值 OLED_ShowNum(2,5,Timer_GetCounter(),5);//CNT计数器的值 }}
void TIM2_IRQHandler(void){ if (TIM_GetITStatus(TIM2,TIM_IT_Update) == SET)//获取中断标志位,参数:定时器2,检测更新标志位 { Num++; TIM_ClearITPendingBit(TIM2,TIM_IT_Update);//清除标志位 }}什么时候可以使用浮空输入?
如果外部输入的信号功率很小时,内部的上拉电阻可能影响到外部输入信号,这时候就使用浮空输入模式,防止影响外部输入电平。
高级定时器
问题
没有初始化重复计数器造成定时器计数出现计数缓慢,被其他中断程序干扰的现象
解决方法:
TIM_TimeBaseStructure.TIM_RepetitionCounter=0;//重复计数器,高级定时器钟存在,