
2632 字
13 分钟
【数字电路】课程设计
设计题目: 智能消防系统
题目来源: 2023 年全国大学生电子设计竞赛试题试题 G 题
一、 任务:
- 设计一套智能消防系统, 采用 FPGA 实验板。 防区区域为 40dm× 48dm,
- 可能出现的火源如图所示的 1、 2、 3、 4。 当消防车接收到火源地点位置信息即刻前往熄灭火源, 消防工作完成时间越短越好。 其中白色部分是街区, 消防车不得驶入, 红色区域是消防车停车点。
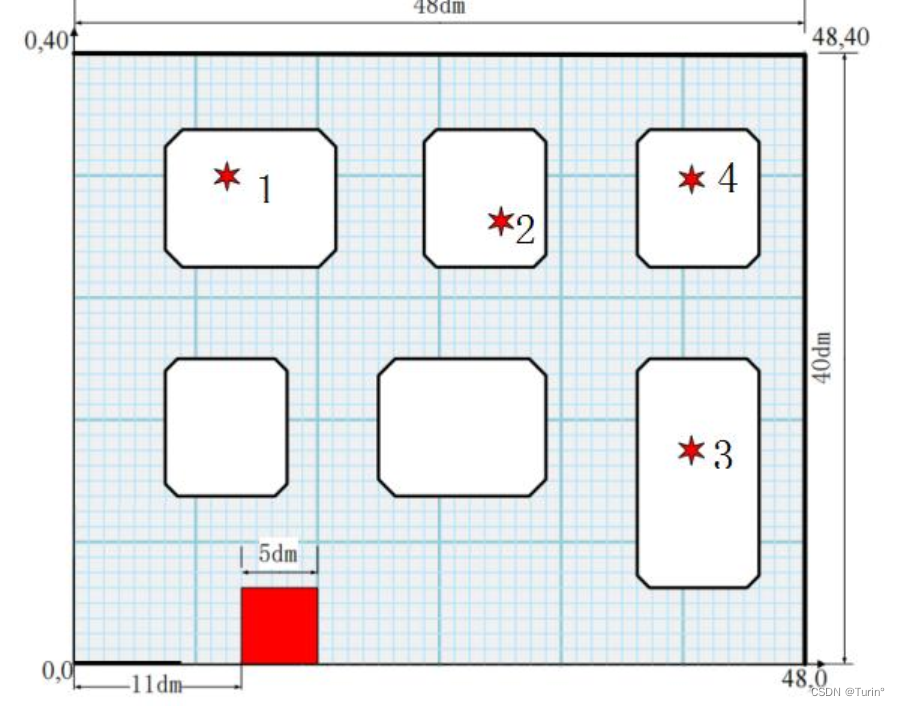
二、 要求:
- 消防车起始停留在红色区域, 接收到火情信息并显示火源地点位置坐标后,
- 出发前往火源地点, 途中不得碾压街区及其边界线。 消防车距离火源地点 5dm内停车, 发出声光报警, 持续 5 秒, 表示将模拟火源熄灭, 之后消防车返回红色区域。 从消防车出发到返回红色区域, 用时越短越好
三、硬件部分
- 主要结构:4驱直流电机小车
- 主控:FPGA
- 传感器:1.四路循迹模块(避线) 2.红外计数器(测速/里程计算)
- 代码主要语法:状态机
四、解题四路
一、调试小车基本运动模式
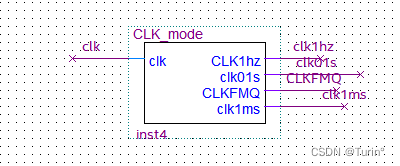
什么是分频器?
分频器原理
- 通过检测输入时钟信号下降沿(上升沿),或者说采样的方法,控制输出的时钟信号频率。
如将50MHZ的时钟信号12分频:
process(clk,q1)begin if clk'event and clk='1' then if q1<=2 then CLKFMQ<='1';q1<=q1+1; --改变q1<=2参数可变更占空比 elsif q1=11 then CLKFMQ<='0';q1<=0; --改变q1=11参数可以变更CLKFMQ的频率 else CLKFMQ<='0';q1<=q1+1; end if; end if;end process ;分频器模块
- 用于产生各种所需频率的方波信号
--------------------------------------LIBRARY IEEE;USE IEEE.STD_LOGIC_1164.ALL;USE IEEE.STD_LOGIC_ARITH.ALL;USE IEEE.STD_LOGIC_UNSIGNED.ALL;--------------------------------------ENTITY CLK_mode is--分频器模块 PORT( clk:in std_logic; --系统晶振源 50MHZ CLK1hz,clk01s,CLKFMQ,clk1ms:out std_logic--1hz,1000hz,蜂鸣器频率 );END CLK_mode ;--------------------------------------ARCHITECTURE abc OF CLK_mode ISsignal q1:integer range 0 to 24999; --中间信号signal q2:integer range 0 to 4999999;signal q3:integer range 0 to 49999;BEGIN--蜂鸣器频率--process(clk,q1)begin if clk'event and clk='1' then if q1<=12999 then CLKFMQ<='1';q1<=q1+1; elsif q1=24999 then CLKFMQ<='0';q1<=0; else CLKFMQ<='0';q1<=q1+1; end if; end if;end process ;--0.1s的分频--process(clk) begin if clk'event and clk='1'then if q2<=5 then clk01s<='1';q2<=q2+1; elsif q2=4999999 then clk01s<='0';q2<=0; else clk01s<='0';q2<=q2+1; end if; end if;end process;--1ms--process(clk) begin if clk'event and clk='1'then if q3<=40000 then clk1ms<='1';q3<=q3+1; elsif q3=49999 then clk1ms<='0';q3<=0; else clk1ms<='0';q3<=q3+1; end if; end if;end process;end abc;什么是PWM?
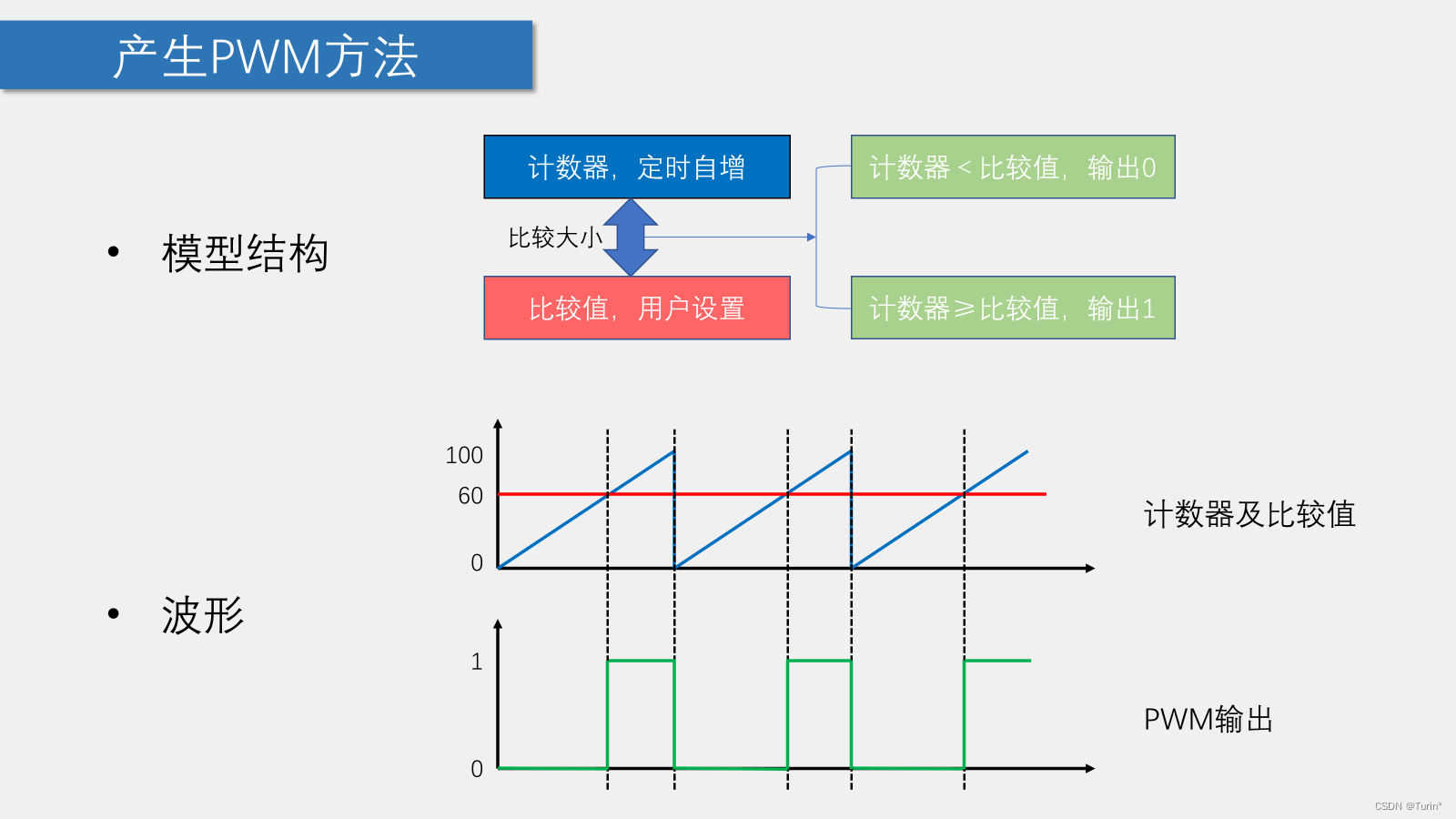
- PWM(Pulse Width Modulation)即脉冲宽度调制,在具有惯性的系统中,可以通过对一系列脉冲的宽度进行调制,来等效地获得所需要的模拟参量,常应用于电机控速、开关电源等领域
- PWM重要参数: 频率 = 1 / TS 占空比 = TON / TS 精度 = 占空比变化步距
信号接口/变量定义:
-----------------------------------------------------------------------------------------LIBRARY IEEE;USE IEEE.STD_LOGIC_1164.ALL;USE IEEE.STD_LOGIC_ARITH.ALL;USE IEEE.STD_LOGIC_UNSIGNED.ALL;-----------------------------------------------------------------------------------------ENTITY Carcontrol_4 is--路线四控制模块PORT(CLK,CLKFMQ,clk01s,clk1ms:in std_logic; --pwm,时钟信号,复位信号 RESET:IN STD_LOGIC; Mapan:in std_logic;--码盘信号 X1,X2:in std_logic_vector(3 downto 0);--巡线信号 en11,en12,en21,en22,FMQ:OUT std_logic;--通道A B 的驱动电压 turn_timer1,LED:out std_logic_vector(7 downto 0):="00000000";--计数器 contrologic:OUT std_logic_vector(7 downto 0):="00000000"--电机驱动/制动的信号--输出到数据选择器上 );END Carcontrol_4;-----------------------------------------------------------------------------------------ARCHITECTURE abc OF Carcontrol_4 IS type Sreg0_type is--状态枚举 (T0,T00,T01,T20,T1,T2,T21,T3, stop1,stop2,stop3,stop4, TX1,TX1fix,TX1end, TX2,TX2fix,TX2end, TX3,TX3fix,TX3end, TBX1,TBX1fix,TBX1end, TBX2,TBX2fix,TBX2end, TBX3,TBX3fix,TBX3end, TB1,TB2,TB3,TB4,TB5,HT); signal XJ :std_logic_vector(7 downto 0);--两个四路循迹模块的并置信号 signal Sreg0: Sreg0_type;--状态类型 signal FMQEN: std_logic:='1';--蜂鸣器的使能信号,低电平有效 signal Z11,Z12,Z21,Z22:integer;--PWM脉宽调制占空比 signal left1,left2,right1,right2:std_logic; signal q1:integer range 0 to 100; signal q2:integer range 0 to 100; signal q3:integer range 0 to 100; signal q4:integer range 0 to 100; signal turn_timer:INTEGER range 0 to 100000 ;BEGINXJ<=X1&X2;--循迹信号(八位)LED<=XJ;--通过LED观察循迹模块是否正常运行EN11<=left1;EN12<=right1;EN21<=left2;EN22<=right2;--电机的PWM信号输入----------------------------------------------四个模块,分别控制小车四个电机的PWM信号输入--占空比定义为 变量(整型),在没有pid控制的情况下,便于对小车进行校准,以及调速。process(clk,q1)begin if clk'event and clk='1' then if q1<=Z11 then left1<='1';q1<=q1+1;--高电平有效值定义为整型,便于在状态机中进行变速 elsif q1=100 then left1<='0';q1<=0; else left1<='0';q1<=q1+1; end if; end if;end process;process(clk,q2)begin if clk'event and clk='1' then if q2<=Z12 then right1<='1';q2<=q2+1; elsif q2=100 then right1<='0';q2<=0; else right1<='0';q2<=q2+1; end if; end if;end process;process(clk,q3)begin if clk'event and clk='1' then if q3<=Z21 then left2<='1';q3<=q3+1; elsif q3=100 then left2<='0';q3<=0; else left2<='0';q3<=q3+1; end if; end if;end process;process(clk,q4)begin if clk'event and clk='1' then if q4<=Z22 then right2<='1'; q4<= q4+1; elsif q4=100 then right2<='0'; q4<=0; else right2<='0';q4<=q4+1; end if; end if;end process;-----------------------------------------------------------------------------路线规划(以路线4为例)
计时器(控制小车在不同状态下定时运动)
process(clk1ms,Timer_flag)begin if Timer_flag = 1 THEN if rising_edge(clk1ms) THEN turn_timer <= turn_timer +1; end if; else turn_timer<=0; end if;end process;程序主要部分(状态机)
不同状态下,根据路径规划,小车的运动姿态(转向,直行)不同,每个状态有特定的状态转移条件(运动时间(用红外计数里程判断更精准),特征值(黑线)
- 小车碰到黑线(居民楼)进行偏移转向
- 车头碰到黑线(关键点检测)进行直角转弯
- 小车要精确地行驶,到底指定地点,需要利用好黑线,既不能触线,也不能过偏,即贴线行驶,这就要使得小车在贴线行驶的路段在规定的 时间 / 里程 内,进行贴线行驶->避线->贴线行驶,三个状态的闭环,在小车行驶姿态垂直于黑线时的路径,循迹模块检测黑线直接进行直角转弯即可(这样就不需要控制里程/时间)。
- 规划好前往火源点的路径后,返回的路径按照相反的逻辑控制即可。
-----------------------------------------------------------------------------PROCESS(reset, clk1ms)--1ms的时钟信号,用于状态机的状态检测以及计时器的计时精度BEGIN IF reset = '1' THEN--复位信号 Sreg0 <= T0;FMQEN<='1';Z11<=36;Z12<=29;Z21<=36;Z22<=29;--蜂鸣器无效,状态机初始化 contrologic <= "00000000";--控制逻辑均置零 turn_timer<= 0 ;--计数器清零 ELSIF rising_edge(clk1ms) THEN CASE Sreg0 IS WHEN T0 =>contrologic <= "01100110";Z11<=38;Z12<=34;Z21<=38;Z22<=34; --直行 if turn_timer = 1000 then Sreg0 <= T00; Timer_flag<=1; else Timer_flag<=0; end if; WHEN T00 => if XJ(3)='0' then--检测黑线 Sreg0<=T01; ELSE Sreg0<=T00; end if; WHEN T01 =>contrologic <= "10011001"; Z11<=36;Z12<=29;Z21<=36;Z22<=29;--碰到黑线回退 if turn_timer = 700 then --1450 Sreg0 <= T1; Timer_flag<=1; else Timer_flag<=0; end if; WHEN T1 =>contrologic <= "00100010";Z12<=40;Z22<=40;--转弯 if turn_timer = 1250 then Sreg0 <= stop1; Timer_flag<=1; else Timer_flag<=0; end if; WHEN stop1 =>contrologic <= "00000000" ;--停止 if turn_timer = 300 then Sreg0 <= T2; Timer_flag<=1; else Timer_flag<=0; end if;-------------------------------------------------------------------------------贴线 WHEN T2 =>contrologic <= "01100110";Z11<=38;Z12<=34;Z21<=38;Z22<=34; --空白区域直行 if turn_timer = 1500 then Sreg0 <= TX1; Timer_flag<=1; else Timer_flag<=0; end if; When TX1 =>contrologic <= "01100110";Z11<=38;Z12<=34;Z21<=38;Z22<=34; --贴线循迹(街区2) if (XJ(0) and XJ(1) and XJ(2) and XJ(3)) = '0' then Sreg0 <= TX1fix; elsif turn_timer = 2800 then--完成贴线 Sreg0 <= TX1end; Timer_flag<=1; else Timer_flag<=0; end if; WHEN TX1fix => contrologic <= "10101010";Z11<=40;Z12<=40;Z21<=40;Z22<=40;--修正 if (XJ(0) and XJ(1) and XJ(2) and XJ(3)) = '1'then Sreg0 <= TX1; end if; When TX1end => contrologic <= "01100110";Z11<=38;Z12<=34;Z21<=38;Z22<=34; --完成贴线,直行小段 if turn_timer = 500 then Sreg0 <= T20; Timer_flag<=1; else Timer_flag<=0; end if;----------------------------------------------------------------------------- WHEN T20 => if XJ(3)='0' then --前端检测黑线 Sreg0<=T21; end if; WHEN T21 =>contrologic <= "10011001"; Z11<=36;Z12<=29;Z21<=36;Z22<=29;--检测到黑线,回退 if turn_timer = 600 then Sreg0 <= T3; Timer_flag<=1; else Timer_flag<=0; end if; WHEN T3 =>contrologic <= "00100010";Z11<=40;Z12<=40;Z21<=40;Z22<=40;--直角转弯 if turn_timer = 1500 then Sreg0 <= TX2; --进入第二段循迹贴线(火源区3) Timer_flag<=1; else Timer_flag<=0; end if;----------------------------------------------------------------------------- WHEN TX2 =>contrologic <= "10011001"; Z11<=36;Z12<=29;Z21<=36;Z22<=29;--进入第二段循迹贴线(火源区3) if XJ(4) = '0' then Sreg0 <= TX2fix; elsif turn_timer = 2000 then--限制贴线时间 Sreg0 <= TX2end; Timer_flag<=1; else Timer_flag<=0; end if; WHEN TX2fix => contrologic <= "01010101";Z11<=40;Z12<=40;Z21<=40;Z22<=40; if XJ(4) = '1'then Sreg0 <= TX2; end if; When TX2end => contrologic <= "10011001"; Z11<=36;Z12<=29;Z21<=36;Z22<=29; if turn_timer = 500 then --贴线结束,空白区直行 Sreg0 <= TX3; Timer_flag<=1; else Timer_flag<=0; end if;----------------------------------------------------------------------------- WHEN TX3 =>contrologic <= "10011001"; Z11<=36;Z12<=29;Z21<=36;Z22<=29;--进入第三段循迹贴线(火源区4) if (XJ(4) and XJ(5) and XJ(6) and XJ(7)) = '0' then Sreg0 <= TX3fix; elsif turn_timer = 1900 then--限制时间 Sreg0 <= TX3end; Timer_flag<=1; else Timer_flag<=0; end if; WHEN TX3fix => contrologic <= "01010101";Z11<=40;Z12<=40;Z21<=40;Z22<=40; if (XJ(4) and XJ(5) and XJ(6) and XJ(7)) = '1'then Sreg0 <= TX3; end if; WHEN TX3end=>FMQEN<='0';contrologic <= "00000000"; --报警 if turn_timer =4999 then Sreg0 <= TBX1;FMQEN<='1'; Timer_flag<=1; else Timer_flag<=0; end if;---------------------------------------------------------------------------------------------------------------------------------------------------------- WHEN TBX1 =>contrologic <= "01100110"; Z11<=38;Z12<=34;Z21<=38;Z22<=34; --进入返回第一段循迹贴线(火源区4) if (XJ(0) and XJ(1) and XJ(2) and XJ(3)) = '0' then Sreg0 <= TBX1fix; elsif turn_timer = 1200 then Sreg0 <= TBX1end; Timer_flag<=1; else Timer_flag<=0; end if; WHEN TBX1fix => contrologic <= "10101010";Z11<=40;Z12<=40;Z21<=40;Z22<=40; if (XJ(0) and XJ(1) and XJ(2) and XJ(3))= '1'then Sreg0 <= TBX1; end if;----------------------------------------------------------------------------- When TBX1end => contrologic <= "01100110";Z11<=38;Z12<=34;Z21<=38;Z22<=34; --空白区域 if turn_timer = 500 then Sreg0 <= TBX2; Timer_flag<=1; else Timer_flag<=0; end if; WHEN TBX2 =>contrologic <= "01100110";Z11<=38;Z12<=34;Z21<=38;Z22<=34;--进入返回第二段循迹贴线(火源区3) if (XJ(0) and XJ(1) and XJ(2) and XJ(3)) = '0' then Sreg0 <= TBX2fix; elsif turn_timer = 3500 then Sreg0 <= TBX2end; Timer_flag<=1; else Timer_flag<=0; end if; WHEN TBX2fix => contrologic <= "10101010";Z11<=40;Z12<=40;Z21<=40;Z22<=40; if (XJ(0) and XJ(1) and XJ(2) and XJ(3)) = '1'then Sreg0 <= TBX2; end if;------------------------------------------------------------------------------ WHEN TBX2end=>contrologic <= "01100110";Z11<=38;Z12<=34;Z21<=38;Z22<=34;--前端检测黑线 if XJ(3)='0' then Sreg0<=HT; Else Sreg0<=TBX2end; end if; WHEN HT =>contrologic <= "10011001"; Z11<=36;Z12<=29;Z21<=36;Z22<=29;--碰到黑线回退 if turn_timer = 500 then --1450 Sreg0 <= TB3; Timer_flag<=1; else Timer_flag<=0; end if; WHEN TB3=>contrologic <= "00100010";Z11<=40;Z12<=40;Z21<=40;Z22<=40;--转向 if turn_timer = 900 then Sreg0 <= TBX3; Timer_flag<=1; else Timer_flag<=0; end if;------------------------------------------------------------------------------ WHEN TBX3 =>contrologic <= "01100110";Z11<=38;Z12<=34;Z21<=38;Z22<=34; --贴线循迹,回到起点 if (XJ(0) and XJ(1) and XJ(2) and XJ(3)) = '0' then Sreg0 <= TBX3fix; elsif turn_timer = 4200 then Sreg0 <= TBX3end; Timer_flag<=1; else Timer_flag<=0; end if; WHEN TBX3fix => contrologic <= "10101010";Z11<=40;Z12<=40;Z21<=40;Z22<=40; if (XJ(0) and XJ(1) and XJ(2) and XJ(3)) = '1'then Sreg0 <= TBX3; end if;------------------------------------------------------------------------------ WHEN OTHERS => null; contrologic<= "00000000"; END CASE; END IF; END PROCESS;PROCESS(FMQEN)BEGIN IF FMQEN<='0'then FMQ<=CLKFMQ; ELSE FMQ<='1'; END IF;END PROCESS;END abc;四路数据选择器模块
LIBRARY IEEE;USE IEEE.STD_LOGIC_1164.ALL;USE IEEE.STD_LOGIC_ARITH.ALL;USE IEEE.STD_LOGIC_UNSIGNED.ALL;--四路(总线式)数据选择器,通过四位按键控制电机逻辑/电机有效电压(PWM)/蜂鸣器信号/选择小车行驶路线ENTITY MUX4 ISPORT(C1,C2,C3,C4:IN STD_LOGIC_VECTOR(7 DOWNTO 0); EN11_1,EN12_1,EN21_1,EN22_1:in std_logic; EN11_2,EN12_2,EN21_2,EN22_2:in std_logic; EN11_3,EN12_3,EN21_3,EN22_3:in std_logic; EN11_4,EN12_4,EN21_4,EN22_4:in std_logic; FMQ1,FMQ2,FMQ3,FMQ4:in std_logic; RESET:IN STD_LOGIC_vector(3 downto 0);--路线选择信号 FMQ:out std_logic;--蜂鸣器 LOGIC:OUT STD_LOGIC_vector(7 DOWNTO 0);--小车运动控制逻辑 EN11,EN12,EN21,EN22:OUT STD_LOGIC;--小车电机PWM方波输出信号 CLK1MS:in std_logic;--光耦传感器脉冲,复位信号,1MS时钟 LEDSEG: OUT STD_LOGIC_VECTOR(6 DOWNTO 0);--LED显示 Y:out std_logic_VECTOR(5 DOWNTO 0)--共阴极 );END MUX4;--ARCHITECTURE ABC OF MUX4 ISsignal ledin:std_logic_vector(3 downto 0);signal SEL:std_logic_vector(2 downto 0):="000";BEGIN--显示译码器--P11:process (ledin) BEGIN CASE ledin IS WHEN "0000"=>ledseg<="0111111";--"1111111110"; WHEN "0001"=>ledseg<="0000110";--"1111111101"; WHEN "0010"=>ledseg<="1011011";--"1111111011"; WHEN "0011"=>ledseg<="1001111";--"1111110111"; WHEN "0100"=>ledseg<="1100110";--"1111101111"; WHEN "0101"=>ledseg<="1101101";--"1111011111"; WHEN "0110"=>ledseg<="1111101";--"1110111111"; WHEN "0111"=>ledseg<="0000111";--"1101111111"; WHEN "1000"=>ledseg<="1111111";--"1011111111"; WHEN "1001"=>ledseg<="1101111";--"0111111111"; WHEN "1010"=>ledseg<="0000001";--"0111111111"; WHEN OTHERS=>ledseg<="0000000";--共阴极,无效 END CASE;end process P11;--四位脉冲分配器--p22:process(clk1ms) begin IF clk1ms'event and clk1ms='1' then if sel="101" then sel<="000"; else sel<=sel+1; end if; end if;end process P22;PROCESS(RESET)BEGINCASE RESET ISWHEN "1000" => LOGIC <=C1; EN11<=EN11_1; EN12<=EN12_1; EN21<=EN21_1; EN22<=EN22_1; FMQ<=FMQ1; CASE SEL IS WHEN "001"=>ledin<="0000";y<="111101"; WHEN "010"=>ledin<="1001";y<="111011"; WHEN "011"=>ledin<="0011";y<="110111"; WHEN "100"=>ledin<="0010";y<="101111"; WHEN OTHERS =>ledin<="1111";y<="111111"; END CASE;WHEN "0100" => LOGIC <=C2; EN11<=EN11_2; EN12<=EN12_2; EN21<=EN21_2; EN22<=EN22_2; FMQ<=FMQ2; CASE SEL IS WHEN "000"=>ledin<="0010";y<="111101"; WHEN "001"=>ledin<="1000";y<="111011"; WHEN "010"=>ledin<="0010";y<="110111"; WHEN "011"=>ledin<="1001";y<="101111"; WHEN OTHERS =>ledin<="1111";y<="111111"; END CASE;WHEN "0010" => LOGIC <=C3; EN11<=EN11_3; EN12<=EN12_3; EN21<=EN21_3; EN22<=EN22_3; FMQ<=FMQ3; CASE SEL IS WHEN "000"=>ledin<="0010";y<="111101"; WHEN "001"=>ledin<="1000";y<="111011"; WHEN "010"=>ledin<="0010";y<="110111"; WHEN "011"=>ledin<="1001";y<="101111"; WHEN OTHERS =>ledin<="1111";y<="111111"; END CASE;WHEN "0001" => LOGIC <=C4; EN11<=EN11_4; EN12<=EN12_4; EN21<=EN21_4; EN22<=EN22_4; FMQ<=FMQ4; CASE SEL IS WHEN "000"=>ledin<="0010";y<="111101"; WHEN "001"=>ledin<="1000";y<="111011"; WHEN "010"=>ledin<="0010";y<="110111"; WHEN "011"=>ledin<="1001";y<="101111"; WHEN OTHERS =>ledin<="1111";y<="111111"; end case;WHEN OTHERS=>LOGIC<="00000000";END CASE;END PROCESS;END ABC;